
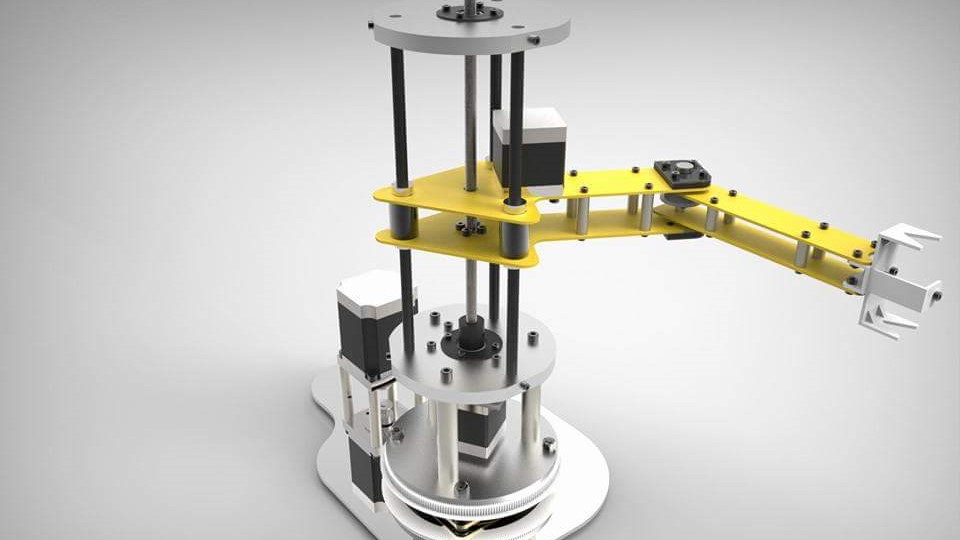

Selective Compliance Articulated Robot Arm (SCARA robot)
Jan 2017 – Apr 2017
• 4DOF scara based robotic arm was designed and fabricated in house
• Stepper motor with the timer pulleys were used for the link motion
• Web based UI was created to control the robotic arm
• Linear and circular interpolation were produced using the Inverse kinematic equation which were derived
• Application like pick and place with good repeatability was tested
• Team members: Prasanna, Vaibhav, swapnil, Mahendra, Ashish
• Mechanical design and fabrication
CAD model : Grabcad page